Realizacje
Poniżej chcielibyśmy zaprezentować część naszych realizacji. Niestety przez wzgląd na nasze zobowiązania w zakresie umów NDA nie jesteśmy w stanie udostępnić większości z nich. Natomiast z pewnością podobne realizacjie będą powtarzały się w przyszłości !
Sektory Przemysłowe
Food & Beverage
Okazuje się, że można tworzyć smaczne i zdrowe produkty tradycyjnym sposobem przy wykorzystaniu maszyn przemysłowych. Kluczem do sukcesu są dobierane przez lata proporcje wybranych składników nadzienia oraz jakość ciasta.
Taśma transportera z certyfikatem FDA dostraja się do wydajności i trybów pracy na maszynie wagowej. Dodatkowo zaprojektowaliśmy i wykonaliśmy zbiornik zasypowy zgodnie z wymiarami przedyskutowanymi z klientem.
Czas realizacji projektu to 2 tygodnie.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, Delta)
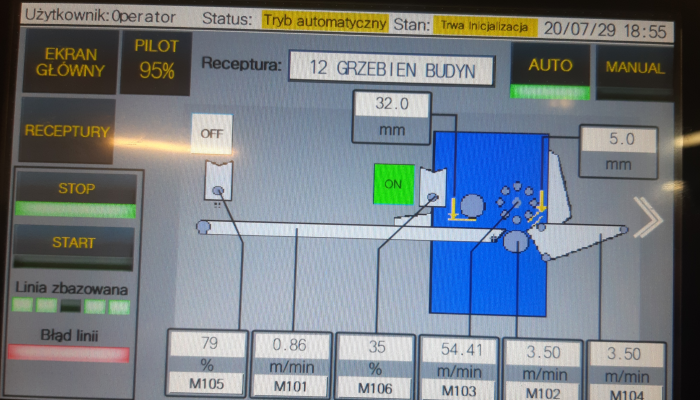
Projekt zakładał zaprojektowanie od nowa modułu obsługującego proces odważania materiałów sypkich (mąki, bułki tartej) i zasypywania odważonej ilości do opakowania.
Czas realizacji projektu to 5 dni roboczych.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, Wobit)
Projekt dotyczył prewencyjnej wymiany warstwy napędowej w maszynie pakującej dla jednego z czołowych polskich producentów wyrobów cukierniczych. Celem projektu było odtworzenie funkcjonalności działania maszyny na nowych, dostępnych u producenta serwonapędach. Wszystkie napędy działały w trybie prędkościowym dlatego najważniejszy okazał się poprawny pomiar parametrów napędów sprzed modernizacji.
Czas realizacji projektu to 7 dni roboczych.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, ABB)
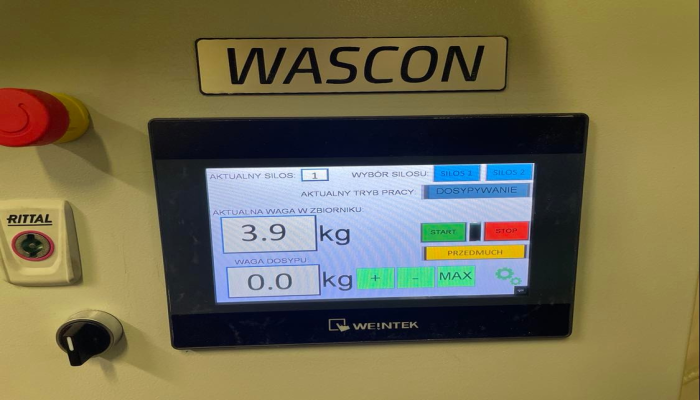
Projekt zakładał stworzenie nowego układu sterowania dla odcinka naważającego materiały sypkie w piekarni. Mąka, która została pobrana z silosów i napowietrzona w celu sprawniejszego transportu została podana do zbiornika zrzutowego. Operator ma opcję ustawić na panelu HMI zadaną wagę z precyzją 100g. Masa całkowita ładunku 500kg.
Czas realizacji projektu to 5 dni roboczych.
Producenci sterowania zastosowani w maszynie (Siemens, Wobit, Weintek)
Automotive
Uczestniczyliśmy w realizacji dwóch projektów dotyczących składania i pakowania poduszek powietrznych typu kurtyna. Usługa dotyczyła kompleksowego zaprogramowania funkcjonalności maszyny. Zakres komponentów wymagających oprogramowania to:
- 5 osi serwo pracujących w trybie synchronicznym
- 2 kamery przemysłowe
- Panel operatorski
- Sterownik bezpieczeństwa
- Warstwa pneumatyczna
- Panel HMI
Czas realizacji projektu to 2 miesiące.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, Keyence, Sick, Festo)
Projekt zakładał integrację robota przemysłowego z prasą dla sześciu wybranych detali oraz stworzenie łatwej do adaptacji struktury programu na robocie tak aby inżynier utrzymania ruchu nie posiadający wiedzy eksperckiej w zakresie programowania robotów mógł dodać i obsłużyć nowy detal.
Czas realizacji projektu to 1 miesiąc.
Producenci sterowania zastosowani w maszynie (Siemens, Fanuc).
CPG & Cosmetics
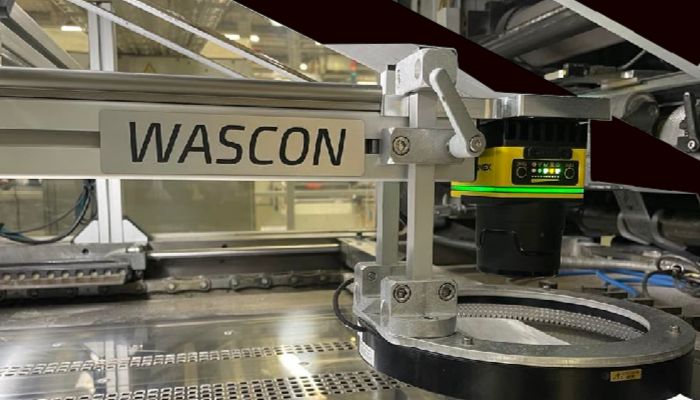
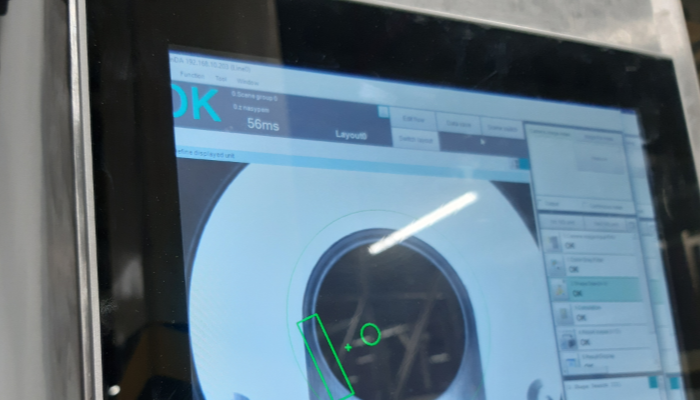
Celem projektu było wykonanie inspekcji wizyjnej w tzw. locie (bez zatrzymania maszyny) dotyczącej pomiaru dyslokacji naniesionej i zgrzanej folii odblaskowej na tekturowej formatce z nadrukiem. W związku z dynamicznymi przezbrojeniami maszyny głównym założeniem było stworzenie intuicyjnej i przejrzystej warstwy synoptycznej pozwalającej zmienić parametry programu kamery na nowy format użytkownikowi nie posiadającemu zaawansowanej wiedzy dot. systemów wizyjnych.
Zainstalowany przez nas system wykonuje pomiar z dokładością do 0,01mm.
Producenci sterowania zastosowani w maszynie (Cognex, Siemens)
Czas realizacji projektu to 1 miesiąc.
Celem projektu było kompleksowe zaprogramowanie maszyny wyposażonej w robota przemysłowego z głowicą zakręcającą na serwonapędzie. Robot przemysłowy z wyznaczonego miejsca pobiera nakrętki z gwintem i zakręca je w funkcji trackingu na butelkach jadących na transporterze.
Czas realizacji projektu to 1 miesiąc.
Producenci sterowania zastosowani w maszynie (Siemens, Kuka, Festo)
Celem projektu było kompleksowe zaprogramowanie nalewaczki wyposażonej w 8 sekcji nalewających, realizacja pomiaru objętości i masy. Po zatrzymaniu się na transporterze 8 butelek wymiarów wynikających z aktualnej receptury na serwomechaniźmie zjeżdża zespół nalewaków rozpoczynający cykl nalewania. W raz z uzupełnianiem cieczy nalewaki podnoszą się celem eliminacji wpływu ciśnienia na proces nalewania oraz powstawiania ewentualnej piany.
Czas realizacji to 1 miesiąc roboczy.
Producenci sterowania zastosowani w maszynie (Siemens, Endress+Hauser, Festo)
Celem projektu była poprawa programu dotyczącego sterowania maszyną wyposażoną w dwa roboty typu SCARA. Proces zakręcania butelek był nie powtarzalny i nie akceptowalny przez klienta końcowego. Problem leżał w braku identyfikacji rozpoczęcia gwintu na nakrętce. Podjeliśmy wspólnie z klientem decyzję o zakupie wytypowanych przez nas dwóch kamer przemysłowych z oświetlaczami. Maszyna zakręca poprawnie 98% butelek, stanowi to poprawę w stosunku do pierwotnej wersji w której poprawność zakręcania ustalała się na 70%.
Czas realizacji to 1,5 miesięcy roboczych.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, Omron)
Steel & Metalurgy
Projekt zakładał integrację robota przemysłowego z tokarką. Pobieranie wałków z palety i umieszczanie ich w szczęce tokarki. W projekcie zajmowaliśmy się programowaniem robota oraz integracją systemu bezpieczeństwa.
Czas realizacji projektu to 1 miesiąc.
Producenci sterowania zastosowani w maszynie (Siemens, ABB)
Aplikacja związana z produkcją szaf stalowych wyposażona w 3 roboty sześcioosiowe. Fragment dużej aplikacji, który był przez nas realizowany to robot o udźwigu 240kg sześcioosiowy z trzema wymiennymi narzędziami. Każde z narzędzi posiada cztery niezależne Toole. Każdy z tooli wyposażony w kilkadziesiąt sygnałów sterujących pneumatyką. Jedno z narzędzi posiada zainstalowaną kamerę przemysłową. Robot obsługuje 5 sektorów magazynu z, którego może pobrać półki z lub bez wieszaków, wieńce z lub bez wieszaków, stopki szafy oraz wieszaki.
Zadaniem robota jest koordynacja obsługi magazynów oraz precyzyjne obieranie detali przy uwzględnieniu maksymalnego wysięgu jednego z tooli przeszło 1,9m. Po pobraniu półki robot przejeżdża nad pozycję kalibracji systemem wizyjnym, który sprawdza poprawność pobrania i przesyła korekty do robota. Robot następnie osadza półkę w szafie wcześniej skalibrowanej systemem wizyjnym tym samym przygotowuje półkę dla robota zgrzewającego.
Stopień zaawansowania robotycznego i ilości zaimplementowanych funkcjonalności tej aplikacji jest na najwyższym poziomie. Celem naszej firmy było nie tylko zaprogramowanie robota ale i również podzielenie się z klientem wieloletnim doświadczeniem w projektach robotycznych. Jest to najbardziej rozbudowana aplikacja robotyczna jaką do tej pory pisaliśmy ale wierzymy, że czekają na nas jeszcze większe wyzwania.
Czas realizacji projektu to 3 miesiące.
Producenci sterowania zastosowani w pojekcie (Kuka, Cognex, Beckhoff, Sick)
Wood
Celem projektu było zaprogramowanie od nowa maszyny produkującej płotki drewniane krzyżowe. Maszyna posiada dwa manipulatory oraz 17 metrowy transporter płytkowy indeksujący. Manipulator samodzielnie pobiera z magazynu a następnie rozstawia kołki bazujące na kolejnych płytkach transportera.
Czas realizacji projektu to 6 miesiący.
Producenci sterowania zastosowani w maszynie (Omron, Sick)
Media & Broadcast
Celem projektu było stworzenie systemu umożliwiającego przemieszczanie się kamery telewizyjnej w układzie XYZ przy zakładanej rozpiętości systemu 200x200m. System jest wyposażony w cztery stacje nawijające, system bloczków oraz platformę mocowania kamery. Operator steruje platformą przy pomocy konsoli zawierającej dwa dżojstiki (XY oraz Z). Stacje nawijające działają w trybie synchronicznym. Komunikacja pomiędzy stacjami jest oparta na światłowodach.
Czas realizacji projektu to 6 miesiący.
Producenci sterowania zastosowani w maszynie (Mitsubishi Electric, Sick)